Golang 垃圾回收剖析
原文转载来源http://legendtkl.com/2017/04/28/golang-gc/
1.Golang GC 发展
- v1.1 STW
- v1.3 Mark STW, Sweep 并行
- v1.5 三色标记法
- v1.8 hybrid write barrier
2.GC 算法简介
2.1 引用计数
引用计数的思想非常简单:每个单元维护一个域,保存其它单元指向它的引用数量(类似有向图的入度)。当引用数量为 0 时,将其回收。引用计数是渐进式的,能够将内存管理的开销分布到整个程序之中。C++ 的 share_ptr 使用的就是引用计算方法。
引用计数算法实现一般是把所有的单元放在一个单元池里,比如类似 free list。这样所有的单元就被串起来了,就可以进行引用计数了。新分配的单元计数值被设置为 1(注意不是 0,因为申请一般都说 ptr = new object 这种)。每次有一个指针被设为指向该单元时,该单元的计数值加 1;而每次删除某个指向它的指针时,它的计数值减 1。当其引用计数为 0 的时候,该单元会被进行回收。虽然这里说的比较简单,实现的时候还是有很多细节需要考虑,比如删除某个单元的时候,那么它指向的所有单元都需要对引用计数减 1。那么如果这个时候,发现其中某个指向的单元的引用计数又为 0,那么是递归的进行还是采用其他的策略呢?递归处理的话会导致系统颠簸。
2.2 标记-清扫 标记-清扫算法是第一种自动内存管理,基于追踪的垃圾收集算法。算法思想在 70 年代就提出了,是一种非常古老的算法。内存单元并不会在变成垃圾立刻回收,而是保持不可达状态,直到到达某个阈值或者固定时间长度。这个时候系统会挂起用户程序,也就是 STW,转而执行垃圾回收程序。垃圾回收程序对所有的存活单元进行一次全局遍历确定哪些单元可以回收。算法分两个部分:标记(mark)和清扫(sweep)。标记阶段表明所有的存活单元,清扫阶段将垃圾单元回收
 标记-清扫算法的优点也就是基于追踪的垃圾回收算法具有的优点:避免了引用计数算法的缺点(不能处理循环引用,需要维护指针)。缺点也很明显,需要 STW。
标记-清扫算法的优点也就是基于追踪的垃圾回收算法具有的优点:避免了引用计数算法的缺点(不能处理循环引用,需要维护指针)。缺点也很明显,需要 STW。
三色标记算法
三色标记算法是对标记阶段的改进,原理如下:
- 起初所有对象都是白色。
- 从根出发扫描所有可达对象,标记为灰色,放入待处理队列。
- 从队列取出灰色对象,将其引用对象标记为灰色放入队列,自身标记为黑色。
- 重复 3,直到灰色对象队列为空。此时白色对象即为垃圾,进行回收。
可视化如下。
 三色标记的一个明显好处是能够让用户程序和 mark 并发的进行,具体可以参考论文:《On-the-fly garbage collection: an exercise in cooperation.》。Golang 的 GC 实现也是基于这篇论文
三色标记的一个明显好处是能够让用户程序和 mark 并发的进行,具体可以参考论文:《On-the-fly garbage collection: an exercise in cooperation.》。Golang 的 GC 实现也是基于这篇论文
2.3 节点复制
节点复制也是基于追踪的算法。其将整个堆等分为两个半区(semi-space),一个包含现有数据,另一个包含已被废弃的数据。节点复制式垃圾收集从切换(flip)两个半区的角色开始,然后收集器在老的半区,也就是 Fromspace 中遍历存活的数据结构,在第一次访问某个单元时把它复制到新半区,也就是 Tospace 中去。在 Fromspace 中所有存活单元都被访问过之后,收集器在 Tospace 中建立一个存活数据结构的副本,用户程序可以重新开始运行了。
优点
- 所有存活的数据结构都缩并地排列在 Tospace 的底部,这样就不会存在内存碎片的问题。
- 获取新内存可以简单地通过递增自由空间指针来实现。
缺点
- 内存得不到充分利用,总有一半的内存空间处于浪费状态。
2.4 分代收集
基于追踪的垃圾回收算法(标记-清扫、节点复制)一个主要问题是在生命周期较长的对象上浪费时间(长生命周期的对象是不需要频繁扫描的)。同时,内存分配存在这么一个事实 “most object die young”。基于这两点,分代垃圾回收算法将对象按生命周期长短存放到堆上的两个(或者更多)区域,这些区域就是分代(generation)。对于新生代的区域的垃圾回收频率要明显高于老年代区域。
分配对象的时候从新生代里面分配,如果后面发现对象的生命周期较长,则将其移到老年代,这个过程叫做 promote。随着不断 promote,最后新生代的大小在整个堆的占用比例不会特别大。收集的时候集中主要精力在新生代就会相对来说效率更高,STW 时间也会更短。
优点
- 性能更优。
缺点
- 实现复杂
3. Golang GC
3.1 Overview
在说 Golang 的具体垃圾回收流程时,我们先来看一下几个基本的问题。
1. 何时触发 GC
在堆上分配大于 32K byte 对象的时候进行检测此时是否满足垃圾回收条件,如果满足则进行垃圾回收。
func mallocgc(size uintptr, typ *_type, needzero bool) unsafe.Pointer {
...
shouldhelpgc := false
// 分配的对象小于 32K byte
if size <= maxSmallSize {
...
} else {
shouldhelpgc = true
...
}
...
// gcShouldStart() 函数进行触发条件检测
if shouldhelpgc && gcShouldStart(false) {
// gcStart() 函数进行垃圾回收
gcStart(gcBackgroundMode, false)
}
}
自己看到的源码(go1.92)
// Allocate an object of size bytes. // Small objects are allocated from the per-P cache's free lists. // Large objects (> 32 kB) are allocated straight from the heap.
func mallocgc(size uintptr, typ *_type, needzero bool) unsafe.Pointer {
if gcphase == _GCmarktermination {
throw("mallocgc called with gcphase == _GCmarktermination")
} if size == 0 {
return unsafe.Pointer(&zerobase)
} if debug.sbrk != 0 {
align := uintptr(16)
if typ != nil {
align = uintptr(typ.align)
} return persistentalloc(size, align, &memstats.other_sys)
} // assistG is the G to charge for this allocation, or nil if
// GC is not currently active. var assistG *g
if gcBlackenEnabled != 0 {
// Charge the current user G for this allocation.
assistG = getg()
if assistG.m.curg != nil {
assistG = assistG.m.curg
}
// Charge the allocation against the G. We'll account
// for internal fragmentation at the end of mallocgc. assistG.gcAssistBytes -= int64(size) if assistG.gcAssistBytes < 0 {
// This G is in debt. Assist the GC to correct
// this before allocating. This must happen // before disabling preemption. gcAssistAlloc(assistG)
} } // Set mp.mallocing to keep from being preempted by GC.
mp := acquirem()
if mp.mallocing != 0 {
throw("malloc deadlock")
} if mp.gsignal == getg() {
throw("malloc during signal")
} mp.mallocing = 1 shouldhelpgc := false
dataSize := size
c := gomcache()
var x unsafe.Pointer
noscan := typ == nil || typ.kind&kindNoPointers != 0
if size <= maxSmallSize {
if noscan && size < maxTinySize {
// Tiny allocator.
// // Tiny allocator combines several tiny allocation requests // into a single memory block. The resulting memory block // is freed when all subobjects are unreachable. The subobjects // must be noscan (don't have pointers), this ensures that // the amount of potentially wasted memory is bounded. // // Size of the memory block used for combining (maxTinySize) is tunable. // Current setting is 16 bytes, which relates to 2x worst case memory // wastage (when all but one subobjects are unreachable). // 8 bytes would result in no wastage at all, but provides less // opportunities for combining. // 32 bytes provides more opportunities for combining, // but can lead to 4x worst case wastage. // The best case winning is 8x regardless of block size. // // Objects obtained from tiny allocator must not be freed explicitly. // So when an object will be freed explicitly, we ensure that // its size >= maxTinySize. // // SetFinalizer has a special case for objects potentially coming // from tiny allocator, it such case it allows to set finalizers // for an inner byte of a memory block. // // The main targets of tiny allocator are small strings and // standalone escaping variables. On a json benchmark // the allocator reduces number of allocations by ~12% and // reduces heap size by ~20%. off := c.tinyoffset
// Align tiny pointer for required (conservative) alignment.
if size&7 == 0 {
off = round(off, 8)
} else if size&3 == 0 {
off = round(off, 4)
} else if size&1 == 0 {
off = round(off, 2)
} if off+size <= maxTinySize && c.tiny != 0 {
// The object fits into existing tiny block.
x = unsafe.Pointer(c.tiny + off)
c.tinyoffset = off + size
c.local_tinyallocs++
mp.mallocing = 0
releasem(mp)
return x
}
// Allocate a new maxTinySize block.
span := c.alloc[tinySpanClass]
v := nextFreeFast(span)
if v == 0 {
v, _, shouldhelpgc = c.nextFree(tinySpanClass)
} x = unsafe.Pointer(v)
(*[2]uint64)(x)[0] = 0
(*[2]uint64)(x)[1] = 0
// See if we need to replace the existing tiny block with the new one
// based on amount of remaining free space. if size < c.tinyoffset || c.tiny == 0 {
c.tiny = uintptr(x)
c.tinyoffset = size
}
size = maxTinySize
} else {
var sizeclass uint8
if size <= smallSizeMax-8 {
sizeclass = size_to_class8[(size+smallSizeDiv-1)/smallSizeDiv]
} else {
sizeclass = size_to_class128[(size-smallSizeMax+largeSizeDiv-1)/largeSizeDiv]
} size = uintptr(class_to_size[sizeclass])
spc := makeSpanClass(sizeclass, noscan)
span := c.alloc[spc]
v := nextFreeFast(span)
if v == 0 {
v, span, shouldhelpgc = c.nextFree(spc)
} x = unsafe.Pointer(v)
if needzero && span.needzero != 0 {
memclrNoHeapPointers(unsafe.Pointer(v), size)
} } } else {
var s *mspan
shouldhelpgc = true
systemstack(func() {
s = largeAlloc(size, needzero, noscan)
}) s.freeindex = 1
s.allocCount = 1
x = unsafe.Pointer(s.base())
size = s.elemsize
} var scanSize uintptr
if !noscan {
// If allocating a defer+arg block, now that we've picked a malloc size
// large enough to hold everything, cut the "asked for" size down to // just the defer header, so that the GC bitmap will record the arg block // as containing nothing at all (as if it were unused space at the end of // a malloc block caused by size rounding). // The defer arg areas are scanned as part of scanstack. if typ == deferType {
dataSize = unsafe.Sizeof(_defer{})
} heapBitsSetType(uintptr(x), size, dataSize, typ)
if dataSize > typ.size {
// Array allocation. If there are any
// pointers, GC has to scan to the last // element. if typ.ptrdata != 0 {
scanSize = dataSize - typ.size + typ.ptrdata
}
} else {
scanSize = typ.ptrdata
}
c.local_scan += scanSize
} // Ensure that the stores above that initialize x to
// type-safe memory and set the heap bits occur before // the caller can make x observable to the garbage // collector. Otherwise, on weakly ordered machines, // the garbage collector could follow a pointer to x, // but see uninitialized memory or stale heap bits. publicationBarrier() // Allocate black during GC.
// All slots hold nil so no scanning is needed. // This may be racing with GC so do it atomically if there can be // a race marking the bit. if gcphase != _GCoff {
gcmarknewobject(uintptr(x), size, scanSize)
} if raceenabled {
racemalloc(x, size)
} if msanenabled {
msanmalloc(x, size)
} mp.mallocing = 0
releasem(mp) if debug.allocfreetrace != 0 {
tracealloc(x, size, typ)
} if rate := MemProfileRate; rate > 0 {
if size < uintptr(rate) && int32(size) < c.next_sample {
c.next_sample -= int32(size)
} else {
mp := acquirem()
profilealloc(mp, x, size)
releasem(mp)
} } if assistG != nil {
// Account for internal fragmentation in the assist
// debt now that we know it. assistG.gcAssistBytes -= int64(size - dataSize)
} if shouldhelpgc {
if t := (gcTrigger{kind: gcTriggerHeap}); t.test() {
gcStart(gcBackgroundMode, t)
} } return x }
mallocgc函数用来给字节对象分配内存 小对象分配在每一个P cache空闲链表 大对象(大于32K)被分配在堆上
// test returns true if the trigger condition is satisfied, meaning // that the exit condition for the _GCoff phase has been met. The exit // condition should be tested when allocating.
func (t gcTrigger) test() bool {
if !memstats.enablegc || panicking != 0 {
return false
}
if t.kind == gcTriggerAlways {
return true
}
if gcphase != _GCoff || gcpercent < 0 {
return false
}
switch t.kind {
case gcTriggerHeap:
// Non-atomic access to heap_live for performance. If
// we are going to trigger on this, this thread just // atomically wrote heap_live anyway and we'll see our // own write. return memstats.heap_live >= memstats.gc_trigger
case gcTriggerTime:
lastgc := int64(atomic.Load64(&memstats.last_gc_nanotime))
return lastgc != 0 && t.now-lastgc > forcegcperiod
case gcTriggerCycle:
// t.n > work.cycles, but accounting for wraparound.
return int32(t.n-work.cycles) > 0
}
return true }
显式调用GC中 // We're now in sweep N or later. Trigger GC cycle N+1, which // will first finish sweep N if necessary and then enter sweep // termination N+1. gcStart(gcBackgroundMode, gcTrigger{kind: gcTriggerCycle, n: n + 1})
// test returns true if the trigger condition is satisfied, meaning // that the exit condition for the _GCoff phase has been met. The exit // condition should be tested when allocating. func (t gcTrigger) test() bool {
if !memstats.enablegc || panicking != 0 {
return false
}
if t.kind == gcTriggerAlways {
return true
}
if gcphase != _GCoff || gcpercent < 0 {
return false
}
switch t.kind {
case gcTriggerHeap:
// Non-atomic access to heap_live for performance. If
// we are going to trigger on this, this thread just // atomically wrote heap_live anyway and we'll see our // own write. return memstats.heap_live >= memstats.gc_trigger
case gcTriggerTime:
lastgc := int64(atomic.Load64(&memstats.last_gc_nanotime))
return lastgc != 0 && t.now-lastgc > forcegcperiod
case gcTriggerCycle:
// t.n > work.cycles, but accounting for wraparound.
return int32(t.n-work.cycles) > 0
}
return true }
当堆增长,或者时间超过两分钟,...都可以触发GC
golang 1.9 :gcStart()在三个地方被调用 1.为大对象分配内存的同时
mallocgc() 函数中`
if shouldhelpgc {
if t := (gcTrigger{kind: gcTriggerHeap}); t.test() {
gcStart(gcBackgroundMode, t)
} }
根据堆内存增长比例进行GC触发
````
2.手动显示触发 runtime.GC()
// We're now in sweep N or later. Trigger GC cycle N+1, which
// will first finish sweep N if necessary and then enter sweep
// termination N+1.
gcStart(gcBackgroundMode, gcTrigger{kind: gcTriggerCycle, n: n + 1})
3.在proc.go中,新开一个线程进行触发
// start forcegc helper goroutine func init() {
go forcegchelper() } func forcegchelper() {
forcegc.g = getg()
for {
lock(&forcegc.lock)
if forcegc.idle != 0 {
throw("forcegc: phase error")
} atomic.Store(&forcegc.idle, 1)
goparkunlock(&forcegc.lock, "force gc (idle)", traceEvGoBlock, 1)
// this goroutine is explicitly resumed by sysmon
if debug.gctrace > 0 {
println("GC forced")
} // Time-triggered, fully concurrent.
gcStart(gcBackgroundMode, gcTrigger{kind: gcTriggerTime, now: nanotime()})
} }
2. GC 触发条件
触发条件主要关注下面代码中的中间部分:forceTrigger || memstats.heap_live >= memstats.gc_trigger 。forceTrigger 是 forceGC 的标志;后面半句的意思是当前堆上的活跃对象大于我们初始化时候设置的 GC 触发阈值。在 malloc 以及 free 的时候 heap_live 会一直进行更新,这里就不再展开了。
// gcShouldStart returns true if the exit condition for the _GCoff
// phase has been met. The exit condition should be tested when
// allocating.
//
// If forceTrigger is true, it ignores the current heap size, but
// checks all other conditions. In general this should be false.
func gcShouldStart(forceTrigger bool) bool {
return gcphase == _GCoff && (forceTrigger || memstats.heap_live >= memstats.gc_trigger) && memstats.enablegc && panicking == 0 && gcpercent >= 0
}
//初始化的时候设置 GC 的触发阈值
func gcinit() {
_ = setGCPercent(readgogc())
memstats.gc_trigger = heapminimum
...
}
// 启动的时候通过 GOGC 传递百分比 x
// 触发阈值等于 x * defaultHeapMinimum (defaultHeapMinimum 默认是 4M)
func readgogc() int32 {
p := gogetenv("GOGC")
if p == "off" {
return -1
}
if n, ok := atoi32(p); ok {
return n
}
return 100
}
GO1.92源码中
func gcinit() {
if unsafe.Sizeof(workbuf{}) != _WorkbufSize {
throw("size of Workbuf is suboptimal")
}
// No sweep on the first cycle.
mheap_.sweepdone = 1
// Set a reasonable initial GC trigger.
memstats.triggerRatio = 7 / 8.0
// Fake a heap_marked value so it looks like a trigger at
// heapminimum is the appropriate growth from heap_marked. // This will go into computing the initial GC goal. memstats.heap_marked = uint64(float64(heapminimum) / (1 + memstats.triggerRatio))
// Set gcpercent from the environment. This will also compute
// and set the GC trigger and goal. _ = setGCPercent(readgogc()) work.startSema = 1
work.markDoneSema = 1 }
默认是两倍堆内存
3. 垃圾回收的主要流程
三色标记法,主要流程如下:
- 所有对象最开始都是白色。
- 从 root 开始找到所有可达对象,标记为灰色,放入待处理队列。
- 遍历灰色对象队列,将其引用对象标记为灰色放入待处理队列,自身标记为黑色。
- 处理完灰色对象队列,执行清扫工作。
详细的过程如下图所示,具体可参考 [9]。
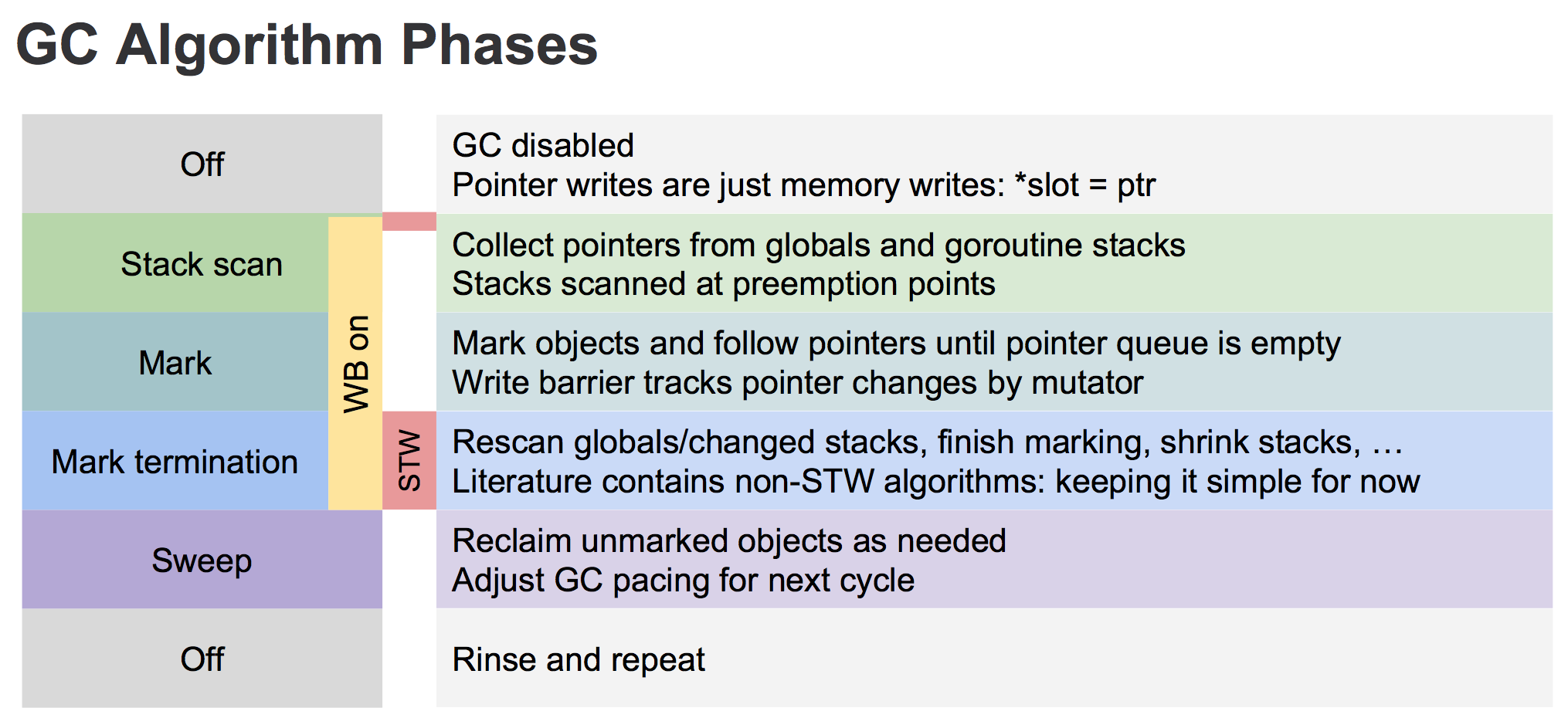
关于上图有几点需要说明的是。
- 首先从 root 开始遍历,root 包括全局指针和 goroutine 栈上的指针。
- mark 有两个过程。
- 从 root 开始遍历,标记为灰色。遍历灰色队列。
- re-scan 全局指针和栈。因为 mark 和用户程序是并行的,所以在过程 1 的时候可能会有新的对象分配,这个时候就需要通过写屏障(write barrier)记录下来。re-scan 再完成检查一下。
- Stop The World 有两个过程。
- 第一个是 GC 将要开始的时候,这个时候主要是一些准备工作,比如 enable write barrier。
- 第二个过程就是上面提到的 re-scan 过程。如果这个时候没有 stw,那么 mark 将无休止。
另外针对上图各个阶段对应 GCPhase 如下:
- Off: _GCoff
- Stack scan ~ Mark: _GCmark
- Mark termination: _GCmarktermination
3.2 写屏障 (write barrier)
关于 write barrier,完全可以另外写成一篇文章,所以这里只简单介绍一下,这篇文章的重点还是 Golang 的 GC。垃圾回收中的 write barrier 可以理解为编译器在写操作时特意插入的一段代码,对应的还有 read barrier。
为什么需要 write barrier,很简单,对于和用户程序并发运行的垃圾回收算法,用户程序会一直修改内存,所以需要记录下来。
Golang 1.7 之前的 write barrier 使用的经典的 Dijkstra-style insertion write barrier [Dijkstra ‘78], STW 的主要耗时就在 stack re-scan 的过程。自 1.8 之后采用一种混合的 write barrier 方式 (Yuasa-style deletion write barrier [Yuasa ‘90] 和 Dijkstra-style insertion write barrier [Dijkstra ‘78])来避免 re-scan。具体的可以参考 17503-eliminate-rescan。
3.3 标记
下面的源码还是基于 go1.8rc3。这个版本的 GC 代码相比之前改动还是挺大的,我们下面尽量只关注主流程。垃圾回收的代码主要集中在函数 gcStart() 中。
// gcStart 是 GC 的入口函数,根据 gcMode 做处理。 // 1. gcMode == gcBackgroundMode(后台运行,也就是并行), _GCoff -> _GCmark // 2. 否则 GCoff -> _GCmarktermination,这个时候就是主动 GC func gcStart(mode gcMode, forceTrigger bool) { ... }
|
1. STW phase 1
在 GC 开始之前的准备工作。
func gcStart(mode gcMode, forceTrigger bool) {
...
//在后台启动 mark worker
if mode == gcBackgroundMode {
gcBgMarkStartWorkers()
}
...
// Stop The World
systemstack(stopTheWorldWithSema)
...
if mode == gcBackgroundMode {
// GC 开始前的准备工作
//处理设置 GCPhase,setGCPhase 还会 enable write barrier
setGCPhase(_GCmark)
gcBgMarkPrepare() // Must happen before assist enable.
gcMarkRootPrepare()
// Mark all active tinyalloc blocks. Since we're
// allocating from these, they need to be black like
// other allocations. The alternative is to blacken
// the tiny block on every allocation from it, which
// would slow down the tiny allocator.
gcMarkTinyAllocs()
// Start The World
systemstack(startTheWorldWithSema)
} else {
...
}
}
`
2. Mark
Mark 阶段是并行的运行,通过在后台一直运行 mark worker 来实现。
func gcStart(mode gcMode, forceTrigger bool) {
...
//在后台启动 mark worker
if mode == gcBackgroundMode {
gcBgMarkStartWorkers()
}
}
func gcBgMarkStartWorkers() {
// Background marking is performed by per-P G's. Ensure that
// each P has a background GC G.
for _, p := range &allp {
if p == nil || p.status == _Pdead {
break
}
if p.gcBgMarkWorker == 0 {
go gcBgMarkWorker(p)
notetsleepg(&work.bgMarkReady, -1)
noteclear(&work.bgMarkReady)
}
}
}
// gcBgMarkWorker 是一直在后台运行的,大部分时候是休眠状态,通过 gcController 来调度
func gcBgMarkWorker(_p_ *p) {
for {
// 将当前 goroutine 休眠,直到满足某些条件
gopark(...)
...
// mark 过程
systemstack(func() {
// Mark our goroutine preemptible so its stack
// can be scanned. This lets two mark workers
// scan each other (otherwise, they would
// deadlock). We must not modify anything on
// the G stack. However, stack shrinking is
// disabled for mark workers, so it is safe to
// read from the G stack.
casgstatus(gp, _Grunning, _Gwaiting)
switch _p_.gcMarkWorkerMode {
default:
throw("gcBgMarkWorker: unexpected gcMarkWorkerMode")
case gcMarkWorkerDedicatedMode:
gcDrain(&_p_.gcw, gcDrainNoBlock|gcDrainFlushBgCredit)
case gcMarkWorkerFractionalMode:
gcDrain(&_p_.gcw, gcDrainUntilPreempt|gcDrainFlushBgCredit)
case gcMarkWorkerIdleMode:
gcDrain(&_p_.gcw, gcDrainIdle|gcDrainUntilPreempt|gcDrainFlushBgCredit)
}
casgstatus(gp, _Gwaiting, _Grunning)
})
...
}
}
Mark 阶段的标记代码主要在函数 gcDrain() 中实现。
// gcDrain scans roots and objects in work buffers, blackening grey
// objects until all roots and work buffers have been drained.
func gcDrain(gcw *gcWork, flags gcDrainFlags) {
...
// Drain root marking jobs.
if work.markrootNext < work.markrootJobs {
for !(preemptible && gp.preempt) {
job := atomic.Xadd(&work.markrootNext, +1) - 1
if job >= work.markrootJobs {
break
}
markroot(gcw, job)
if idle && pollWork() {
goto done
}
}
}
// 处理 heap 标记
// Drain heap marking jobs.
for !(preemptible && gp.preempt) {
...
//从灰色列队中取出对象
var b uintptr
if blocking {
b = gcw.get()
} else {
b = gcw.tryGetFast()
if b == 0 {
b = gcw.tryGet()
}
}
if b == 0 {
// work barrier reached or tryGet failed.
break
}
//扫描灰色对象的引用对象,标记为灰色,入灰色队列
scanobject(b, gcw)
}
}
3. Mark termination (STW phase 2)
mark termination 阶段会 stop the world。函数实现在 gcMarkTermination()。1.8 版本已经不会再对 goroutine stack 进行 re-scan 了。细节有点多,这里不细说了。
func gcMarkTermination() {
// World is stopped.
// Run gc on the g0 stack. We do this so that the g stack
// we're currently running on will no longer change. Cuts
// the root set down a bit (g0 stacks are not scanned, and
// we don't need to scan gc's internal state). We also
// need to switch to g0 so we can shrink the stack.
systemstack(func() {
gcMark(startTime)
// Must return immediately.
// The outer function's stack may have moved
// during gcMark (it shrinks stacks, including the
// outer function's stack), so we must not refer
// to any of its variables. Return back to the
// non-system stack to pick up the new addresses
// before continuing.
})
...
}
3.4 清扫
清扫相对来说就简单很多了。
func gcSweep(mode gcMode) {
...
//阻塞式
if !_ConcurrentSweep || mode == gcForceBlockMode {
// Special case synchronous sweep.
...
// Sweep all spans eagerly.
for sweepone() != ^uintptr(0) {
sweep.npausesweep++
}
// Do an additional mProf_GC, because all 'free' events are now real as well.
mProf_GC()
mProf_GC()
return
}
// 并行式
// Background sweep.
lock(&sweep.lock)
if sweep.parked {
sweep.parked = false
ready(sweep.g, 0, true)
}
unlock(&sweep.lock)
}
|
对于并行式清扫,在 GC 初始化的时候就会启动 `bgsweep()`,然后在后台一直循环。
func bgsweep(c chan int) { sweep.g = getg()
lock(&sweep.lock) sweep.parked = true c <- 1 goparkunlock(&sweep.lock, "GC sweep wait", traceEvGoBlock, 1)
for { for gosweepone() != ^uintptr(0) { sweep.nbgsweep++ Gosched() } lock(&sweep.lock) if !gosweepdone() { // This can happen if a GC runs between // gosweepone returning ^0 above // and the lock being acquired. unlock(&sweep.lock) continue } sweep.parked = true goparkunlock(&sweep.lock, "GC sweep wait", traceEvGoBlock, 1) } }
func gosweepone() uintptr { var ret uintptr systemstack(func() { ret = sweepone() }) return ret }
|
不管是阻塞式还是并行式,都是通过 sweepone()函数来做清扫工作的。如果对于上篇文章 Golang 内存管理 熟悉的话,这个地方就很好理解。内存管理都是基于 span 的,mheap 是一个全局的变量,所有分配的对象都会记录在 mheap 中。在标记的时候,我们只要找到对对象对应的 span 进行标记,清扫的时候扫描 span,没有标记的 span 就可以回收了。
// sweeps one span
// returns number of pages returned to heap, or ^uintptr(0) if there is nothing to sweep
func sweepone() uintptr {
...
for {
s := mheap_.sweepSpans[1-sg/2%2].pop()
...
if !s.sweep(false) {
// Span is still in-use, so this returned no
// pages to the heap and the span needs to
// move to the swept in-use list.
npages = 0
}
}
}
// Sweep frees or collects finalizers for blocks not marked in the mark phase.
// It clears the mark bits in preparation for the next GC round.
// Returns true if the span was returned to heap.
// If preserve=true, don't return it to heap nor relink in MCentral lists;
// caller takes care of it.
func (s *mspan) sweep(preserve bool) bool {
...
}
|
### [](http://legendtkl.com/2017/04/28/golang-gc/#3-5-%E5%85%B6%E4%BB%96 "3.5 其他")3.5 其他
##### [](http://legendtkl.com/2017/04/28/golang-gc/#1-gcWork "1\. gcWork")1\. gcWork
这里介绍一下任务队列,或者说灰色对象管理。每个 P 上都有一个 gcw 用来管理灰色对象(get 和 put),gcw 的结构就是 gcWork。gcWork 中的核心是 wbuf1 和 wbuf2,里面存储就是灰色对象,或者说是 work(下面就全部统一叫做 work)。
type p struct { ... gcw gcWork }
type gcWork struct { // wbuf1 and wbuf2 are the primary and secondary work buffers. wbuf1, wbuf2 wbufptr
// Bytes marked (blackened) on this gcWork. This is aggregated // into work.bytesMarked by dispose. bytesMarked uint64
// Scan work performed on this gcWork. This is aggregated into // gcController by dispose and may also be flushed by callers. scanWork int64 }
|
既然每个 P 上有一个 work buffer,那么是不是还有一个全局的 work list 呢?是的。通过在每个 P 上绑定一个 work buffer 的好处和 cache 一样,不需要加锁。
|
var work struct {
full uint64 // lock-free list of full blocks workbuf
empty uint64 // lock-free list of empty blocks workbuf
pad0 [sys.CacheLineSize]uint8 // prevents false-sharing between full/empty and nproc/nwait
...
}
|
那么为什么使用两个 work buffer (wbuf1 和 wbuf2)呢?我下面举个例子。比如我现在要 get 一个 work 出来,先从 wbuf1 中取,wbuf1 为空的话则与 wbuf2 swap 再 get。在其他时间将 work buffer 中的 full 或者 empty buffer 移到 global 的 work 中。这样的好处在于,在 get 的时候去全局的 work 里面取(多个 goroutine 去取会有竞争)。这里有趣的是 global 的 work list 是 lock-free 的,通过原子操作 cas 等实现。下面列举几个函数看一下 gcWrok。
初始化。
func (w *gcWork) init() { w.wbuf1 = wbufptrOf(getempty()) wbuf2 := trygetfull() if wbuf2 == nil { wbuf2 = getempty() } w.wbuf2 = wbufptrOf(wbuf2) }
|
put。
// put enqueues a pointer for the garbage collector to trace.
// obj must point to the beginning of a heap object or an oblet.
func (w *gcWork) put(obj uintptr) {
wbuf := w.wbuf1.ptr()
if wbuf == nil {
w.init()
wbuf = w.wbuf1.ptr()
// wbuf is empty at this point.
} else if wbuf.nobj == len(wbuf.obj) {
w.wbuf1, w.wbuf2 = w.wbuf2, w.wbuf1
wbuf = w.wbuf1.ptr()
if wbuf.nobj == len(wbuf.obj) {
putfull(wbuf)
wbuf = getempty()
w.wbuf1 = wbufptrOf(wbuf)
flushed = true
}
}
wbuf.obj[wbuf.nobj] = obj
wbuf.nobj++
}
|
get。
`
// get dequeues a pointer for the garbage collector to trace, blocking // if necessary to ensure all pointers from all queues and caches have // been retrieved. get returns 0 if there are no pointers remaining. //go:nowritebarrier func (w *gcWork) get() uintptr { wbuf := w.wbuf1.ptr() if wbuf == nil { w.init() wbuf = w.wbuf1.ptr() // wbuf is empty at this point. } if wbuf.nobj == 0 { w.wbuf1, w.wbuf2 = w.wbuf2, w.wbuf1 wbuf = w.wbuf1.ptr() if wbuf.nobj == 0 { owbuf := wbuf wbuf = getfull() if wbuf == nil { return 0 } putempty(owbuf) w.wbuf1 = wbufptrOf(wbuf) } }
// TODO: This might be a good place to add prefetch code
wbuf.nobj-- return wbuf.obj[wbuf.nobj] }
|
2. forcegc
我们上面讲了两种 GC 触发方式:自动检测和用户主动调用。除此之后 Golang 本身还会对运行状态进行监控,如果超过两分钟没有 GC,则触发 GC。监控函数是 sysmon(),在主 goroutine 中启动。
// The main goroutine
func main() {
...
systemstack(func() {
newm(sysmon, nil)
})
}
// Always runs without a P, so write barriers are not allowed.
func sysmon() {
...
for {
now := nanotime()
unixnow := unixnanotime()
lastgc := int64(atomic.Load64(&memstats.last_gc))
if gcphase == _GCoff && lastgc != 0 && unixnow-lastgc > forcegcperiod && atomic.Load(&forcegc.idle) != 0 {
lock(&forcegc.lock)
forcegc.idle = 0
forcegc.g.schedlink = 0
injectglist(forcegc.g) // 将 forcegc goroutine 加入 runnable queue
unlock(&forcegc.lock)
}
}
}
var forcegcperiod int64 = 2 * 60 *1e9 //两分钟